PID (Proportional-integral-derivative) controller is the most commonly used closed-loop control system in industrial automation. It has applications where we need to control a variable parameter continuously. In this article, we will discuss what is PID control? it’s applications and how PID Control works? Click this link to know the benefits of automation in manufacturing.
What is a PID Controller?
PID controller is a closed-loop control system that measures the process output variable and changes the input according to the error value. The error value is the difference between set-point and measured process variable.
PID controllers control a process similar to how humans control a process. For example, to drive a bike at a constant speed. We need a change the bike throttle according to the error value (Required value- actual value).
In the language of a control system, to drive a bike at a constant speed, we get output from the bike speedometer, predict & analyze the error in the speed and take action (change the throttle) accordingly.
PID controllers work similarly to the process discussed above. Firstly it compares set-point and measured process variables. Predict future errors and change the input to reduce the error value to zero.
PID controllers have applications in car cruise control, quad-copter flight control, the control flow of liquid, temperature control, etc.
Why do we need a PID Controller?
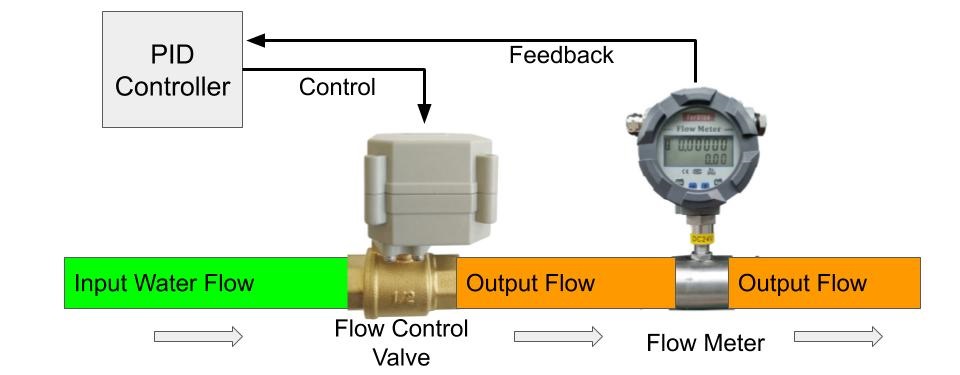
Traditional ON-OFF control can only turn on or off the process. For example, the control valve is closed or open to control water flow in the traditional controllers. Therefore the control system exhibits oscillating behavior, and system accuracy was also less.

PID controllers solve the problems of traditional controllers by predicting future errors and taking corrective actions accordingly. In this way, we can control the process precisely within small set limits.
PID controllers are used in high precision and critical applications such as quad-copter stable flight. It is not feasible to use PID controllers to control every process. You should use the PID controller according to requirements.
How does PID Controller Works?
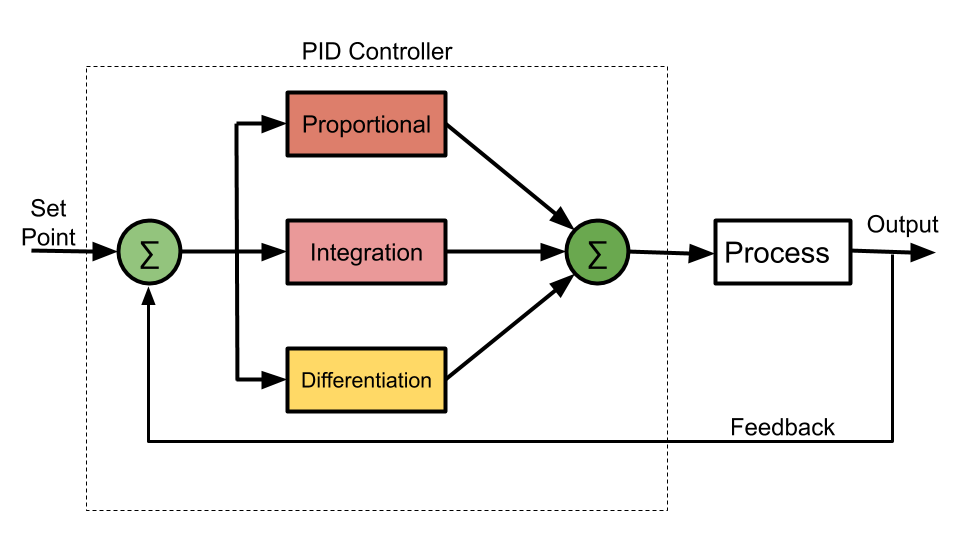
PID control utilizes proportional, Integral, and derivative gain to control a process variable or system output. They get input from process output and compare it with setpoint value to calculate the error signal.
The error value is processed using proportional, derivative, and integration controllers. PID controller provides input to the system according to error value to control the process variable.
We can calculate the Proportional, integral, and derivative gain using various methods to stabilize the controller. First, we need to understand the working and impact of proportional, derivative, and integral gain on process variables to understand the working of a PID controller.
Proportional Gain
Proportional Gain changes the process according to the error value. Mathematically it is equal to the Process Error and Proportional Gain Constant (Kp) multiple.

The higher the value of proportional gain constant, the higher the impact of error value on the process. Therefore higher proportional gain constant values can cause an unstable system.
But if the proportional gain value is small, the process will be less responsive to the error. Therefore it is always recommended to optimize proportional gain constant values.
Integration Gain
The integral controller integrates the error value until the error becomes zero. Therefore it helps in achieving steady-state error zero.
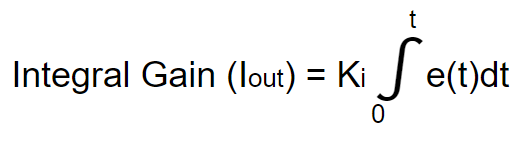
An integral controller improves system stability by limiting any rapid change in the system response.
Derivative Gain
Derivative controllers are capable of predicting future errors. Its value depends on the rate of change of error value.

Derivative control decreases the process output if the process variable is increasing rapidly. Derivative gain has a small contribution in a PID controller because it is highly sensitive to system noise.
PID Controller Response
The below graph shows the impact of proportional gain (Kp), integral gain (Ki), and derivative gain (Kd) values on the process output variable.
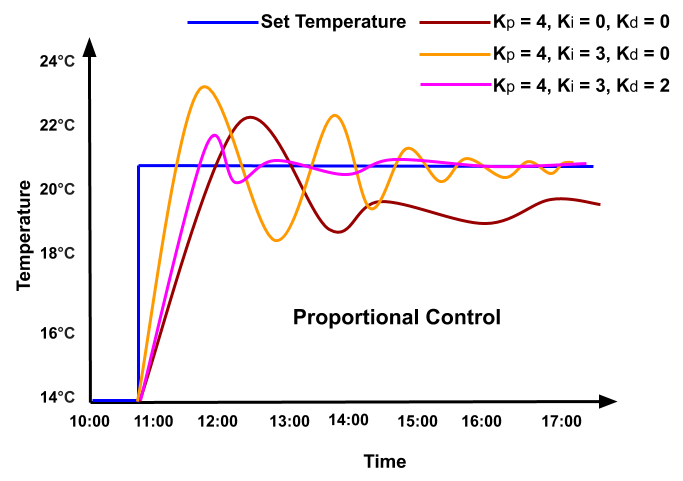
As shown in the above example, If we use a proportional controller to control a process variable (such as temperature). The control parameter varies drastically, and the process has low control accuracy.
But if we improve the process accuracy by increasing the proportional gain (Kp), variation will increase.
We can control the variable parameters more accurately without increasing variation using proportional and integral control (PI Controller). But PI control also has a slow response.
We can improve the system accuracy, reduce variations and improve response time using the PID controller. In PID controller, the derivative term helps in controlling variable parameters more quickly.
PID Controller Tuning
PID tuning is a process to control output variables by optimizing the proportional, derivative, and integral gain values. Tuning & loop optimizing software and various PID controller tuning methods are available to optimize proportional, integral, and derivative gain values.
Trial and Error Method
In trial and error PID controller tuning, gain values are optimized using the trial and error method. Following steps are followed to calculate gain values.
- Firstly integral gain and derivative gain values are kept zero, and proportional gain value is adjusted to achieve system oscillating behavior.
- Afterward, the user adjusts the Integral gain to stop oscillation behavior.
- The user adjusts the derivative gain to improve the response time.
Zeigler-Nichols Method
This method is similar to the trial and error method. But in this, system oscillation behavior is different. We can follow the following steps to calculate gain values using the Zeigler-Nicholas method.
- Firstly set the integral and derivative gains to zero, and adjust the proportional gain to achieve system oscillating behavior.
- Once oscillation starts, the critical gain Kc and the period of oscillations Pc are noted.
- Afterward, the user adjusts proportional, integral, and derivative gain as per Zeigler-Nichols Table given below.
| Ziegler-Nichols Tuning | |||
| Control Type | Kp | Ki | Kd |
|---|---|---|---|
| P | 0.5 x Kc | - | - |
| PI | 0.45 x Kc | Pc / 1.2 | - |
| PID | 0.60 x Kc | 0.5 x Pc | Pc / 8 |
To sum up, PID control algorithms are the simplest way to design a robust control system. Tuning and loop optimizing software improve control system performance. We suggest you read this article on various types of proximity sensors.
We will keep adding more information on types of PID controls. Please add your suggestions, comments, or questions on the type of PID controls in the comment box.
Measurement fluctuations can be prevented – like when sudden changes in incoming signals to a level gauge of a water tank can be smoothed, when required. Ratio control is possible – for example, the flow rate of chlorine fed to tap water can be controlled at a constant level.
Inside a furnace, temperatures can be equalized – by treating the setting of controller No.1 as the input setting of other controllers the temperature within a tunnel furnace can be equalized.