What is Pitch Yaw and Roll Motion?
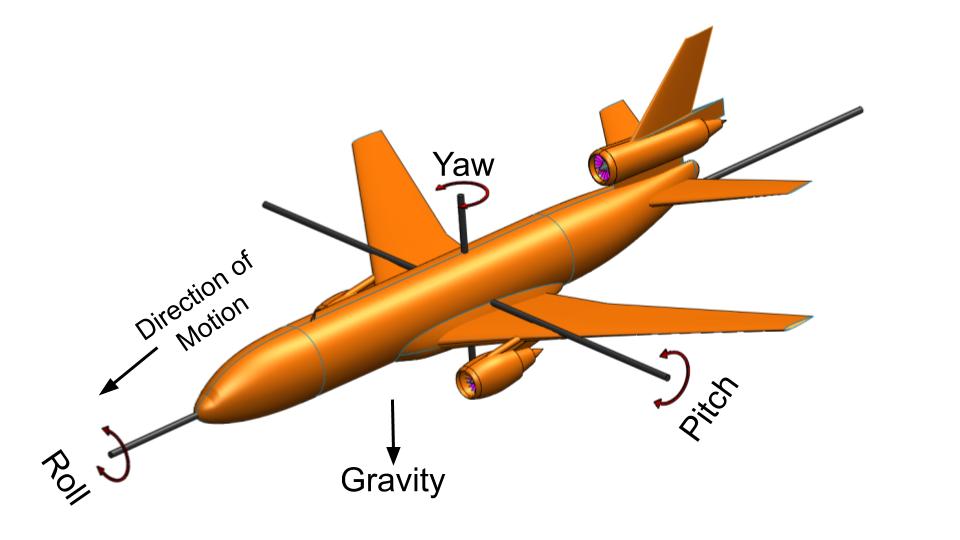
A free body in 3-dimensional space can have three different rotational motions (Roll Pitch Yaw) along three orthogonal-axis.
The axis of the object rotation is known as the Aircraft Principal Axis. These three rotational motions control the position of an object in free space.
But these rotational motions are not limited to determining the position of aircraft or flying objects only. They are also used to control the rotation of automobile vehicles, submarines, and robots.
We will understand the difference between roll pitch and yaw motions by understanding vehicle dynamics and the motion of an aircraft.
Roll Motion
As shown in the above image, the rotation of a free body along the direction of motion (front to the back axis) is known as Roll. And this axis of rotation is known as Roll or Longitudinal Axis.
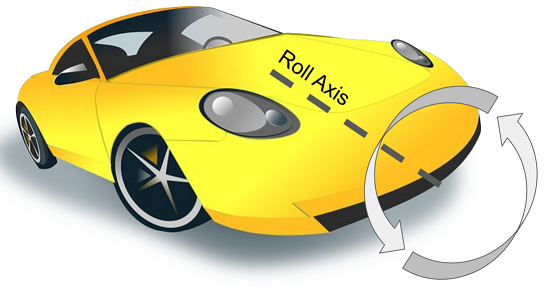
In Vehicle-Dynamics, Roll motion is the rotation of four-wheelers along the axis of the moving direction while it tries to take a turn.
It occurs in four-wheelers due to the reaction of centrifugal force acting on the vehicle’s center of gravity. In other words, rolling in a car depends on the car weight distribution.
Pitch Motion
The rotation of a free body along the Lateral axis (perpendicular to the roll and yaw axis) is known as Pitch Motion. And this axis of rotation is known as Pitch Axis.
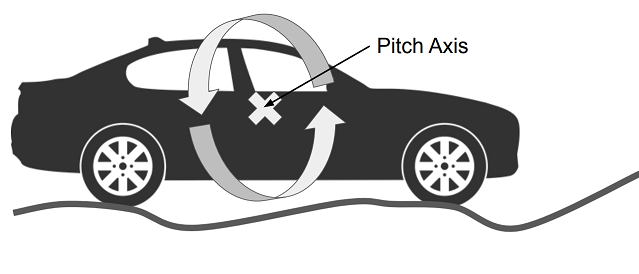
The Pitch motion in a car is the car rotation about the tire axis. You can experience it during:
- The brake or acceleration of a car
- When the car is moving on a bumpy road.
Yaw Motion
The rotation of a free body along the vertical axis or gravitational force axis is known as Yaw. And this axis of rotation is known as the Perpendicular or Yaw Axis.
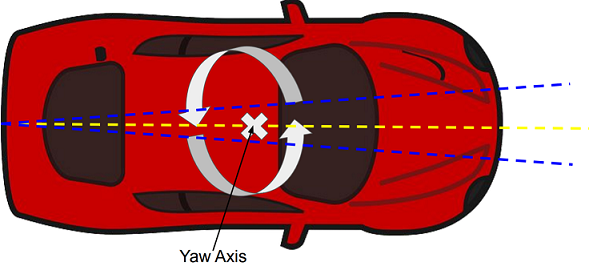
Yaw motion in a car is the car’s rotation about its perpendicular axis. You can experience Yaw motion in the four-wheeler when you turn a high-speed car suddenly and apply brakes. Most good cars design can minimize the impact of yaw.
Importance of Yaw Roll Pitch Motion
Yaw roll and pitch play a key role in controlling the motion of a freely moving body in 3-Dimensional space. Following are the examples of these three motions in various products.
- A plane or quadcopter takes off or lands due to its pitch motion. And yaw motion is used to turn in the left or right direction. In general, for a stable flight, you need to control all three motions of a flying object.
- Gyroscopes utilize yaw roll and pitch motions to stabilize large ships.
- These motion axis of a robot are defined to control the motions of a robot in 3D space. Three-axis electronics gyroscopes are used to measure Yaw Roll and Pitch motion.
- All of these three movements determine the stability and handling of a car in various driving conditions.
Frequently Asked Questions : FAQ
The axis of rotation of an aircraft are known as its principal axis.
Yaw-Roll-Pitch motions are used to control the position of an object on three dimensional space.
To sum up, Yaw roll and pitch control the motion of an object in 3-dimensional space. Gyroscopic sensors are used to measure these motion values. We suggest you also read this article on Degree of Freedom in Mechanical Engineering.
We will keep adding more information on the difference between roll yaw and pitch motions of a freely moving body in 3D Space. Add your suggestions, comments, or questions in the comment box.
WANT TO DISCOVER MORE ABOUT AIRCRAFT…